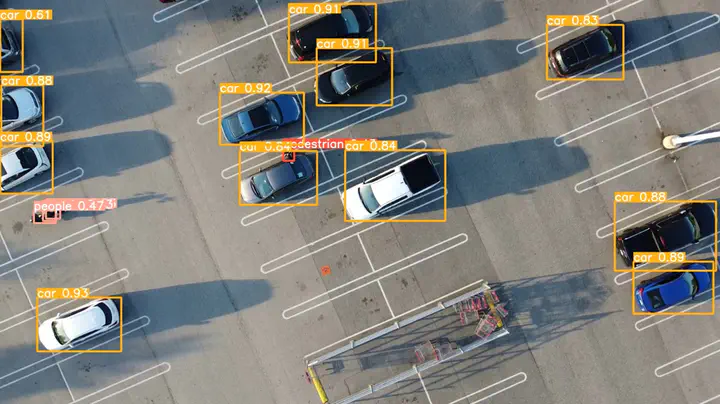
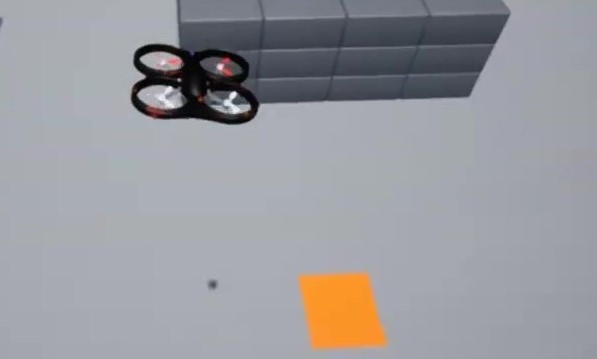
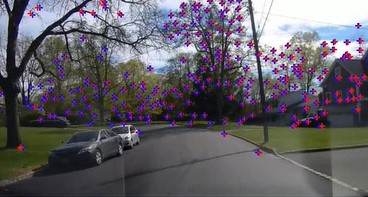
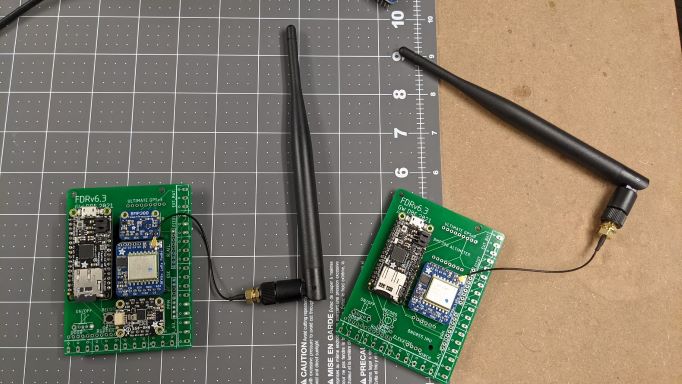
Research Perception for Safe UAS Landing Awareness Online pedestrian and vehicle detection for safe UAS autonomous landing. UAS Landing with Deep Reinforcement Learning Learning to land a multirotor in an AirSim simulation environment using a Deep Q Network. Automatic Waste and Recyclables Sorting A prototype system to classify and automatically sort recyclables from trash. Industry MIT Lincoln Laboratory Prototyped a neural search tool for querying and labeling videos for visual concepts. Sierra Nevada Corp. Monte Carlo testing of terrain navigation for helicopter flying with Enhanced Vision System. Thales Built a live-data dashboard for geospatial visualizations of satellite data. Coursework Travel Trails Collect and contribute to crowd sourced 3D models of landmarks. Rendering Pipeline A scratch-built 3D rendering pipeline built with C++ and SDL. Visual Odometry Final project for graduate course on Robotics Vision & Perception. Image Mosaics Image stitching using perspective transformation. Seam Carving Panoramas and caricatures - content aware image resizing. RGB Image Alignment Creating color images from 3 channel digitized film. Design/Build/Fly Flight Data Recorder Designed and built custom board to collect flight telemetry and transmit data to ground station. GW DBF Competes in Wichita, KS We competed in the AIAA 2022 Design/Build/Fly Competition. UAV Towed Sensor Designed and flight tested a deployable sensor for the special mission requirement. Misc. Animated Bloom Sculptures The golden ratio applied to art sculpture. Persistence of vision illusion.